Julius Arolovitch
Undergraduate, Electrical and Computer Engineering & Robotics, CMU
Email: juliusa@cmu.edu
Phone: (617) 992-8096
Address: 1612E Newell-Simon Hall, 5000 Forbes Ave, Pittsburgh, PA, 15213
CV: Download
Undergraduate, Electrical and Computer Engineering & Robotics, CMU
Email: juliusa@cmu.edu
Phone: (617) 992-8096
Address: 1612E Newell-Simon Hall, 5000 Forbes Ave, Pittsburgh, PA, 15213
CV: Download
Hello! I'm Julius, a junior at Carnegie Mellon studying ECE and Robotics. I conduct research at CMU's Robotics Institute under Professors Maxim Likhachev and Howie Choset on motion planning.
My current work focuses on developing algorithms that leverage parallelism for planning for manipulation (Search-based Planning Lab) and decentralized agent distribution methods for Ergodic search for agent teams with heterogenous sensing abilities (Biorobotics Lab).
I am excited by work to better enable robotic agents to plan in dynamic, stochastic, or partially-observable environments. More broadly, I am passionate about building intelligent systems that help people.
Previously, I spent the summer of 2023 at Tel Aviv University's Robotics Lab working on learning for object recognition with underactuated hands, and the summer of 2024 at Johnson & Johnson doing systems integration R&D for robotic manipulators on Ottava. Before I caught interest in robotics, I wanted to be a doctor; I spent my first year of undergrad pre-med at the Bioengineering program at the University of Pittsburgh.
In my free time, I enjoy exploring new corners of the world, hiking up tall things, playing classical piano, and compete in poker and hackathons. I'm actively involved in Jewish life at CMU, serving as President of CMU's Hillel and in various capacities in student government.
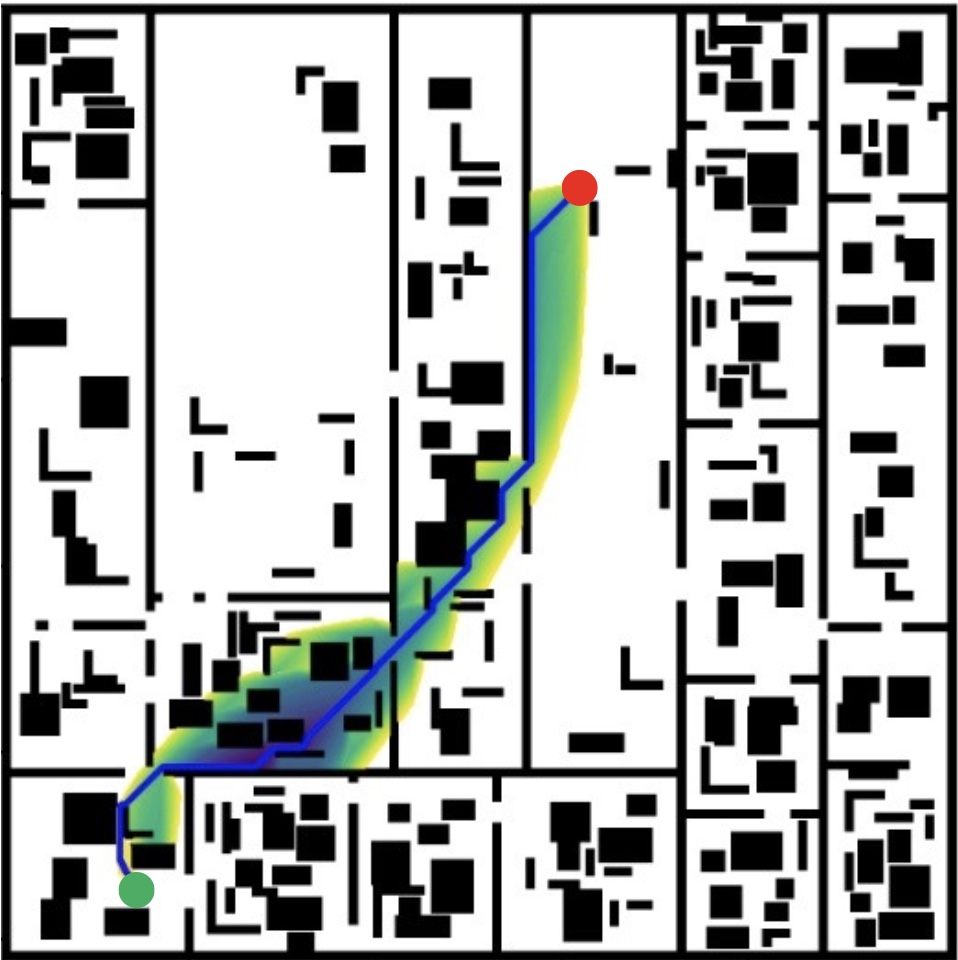
Authors: Julius Arolovitch*, Itamar Mishani*, Ramkumar Natarajan, Maxim Likhachev
Under Review, International Conference on Automated Planning and Scheduling (ICAPS) 2025
Download PDF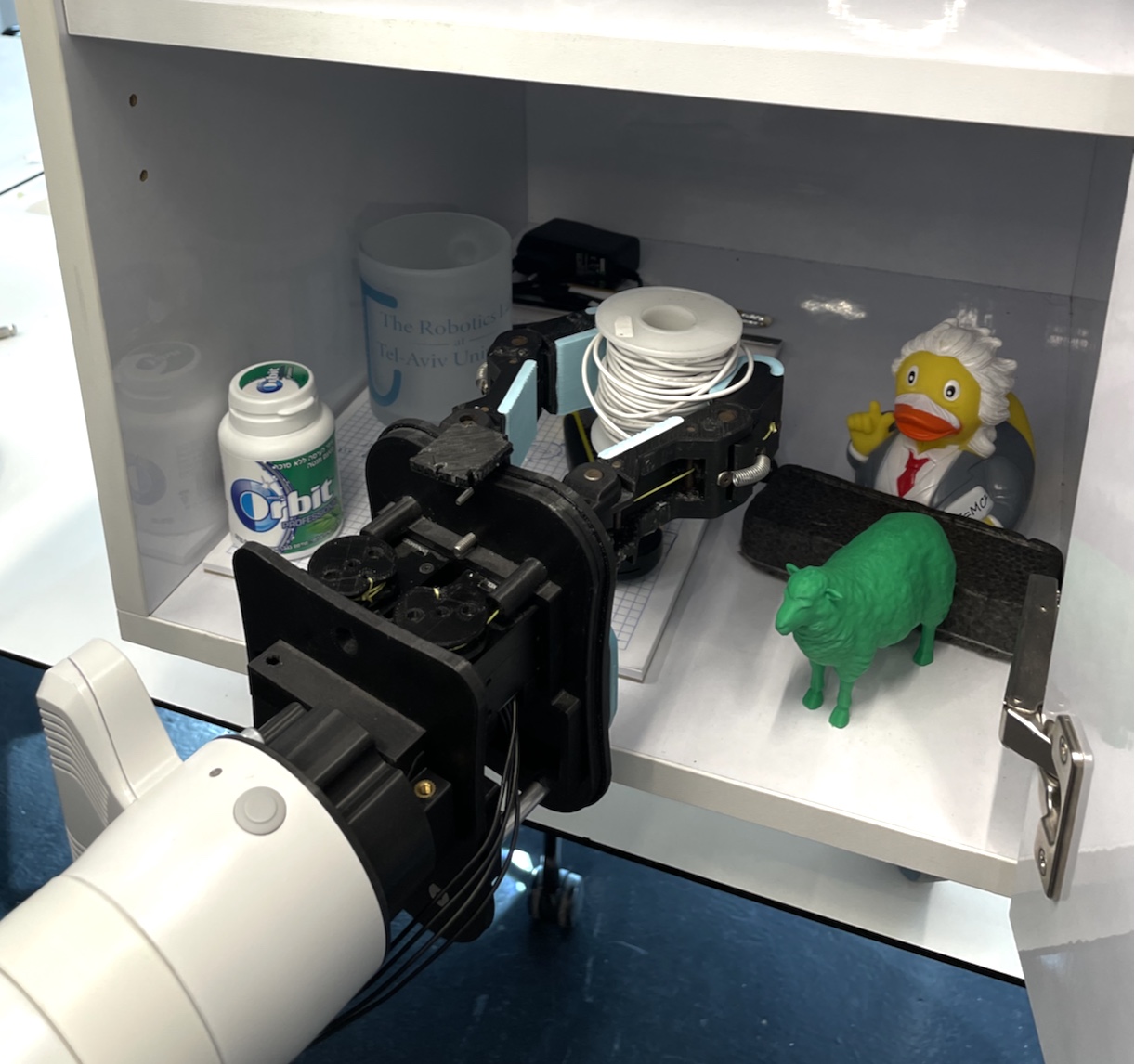
Authors: Julius Arolovitch*, Osher Azulay*, Avishai Sintov
IEEE International Conference on Robotics and Automation (ICRA) 2024
16-280 Intelligent Robotic Systems, Teaching Assistant, Carnegie Mellon, Spring 2025
18-100 Introduction to Electrical & Computer Engineering, Teaching Assistant, Carnegie Mellon, Spring 2025
PHYS0175 Physics 2 for Engineers, Teaching Assistant, University of Pittsburgh, Spring 2023
For 16-831 Introduction to Robot Learning @ CMU, I implemented DAgger and Behavior Cloning for agents in OpenAI Gym and MuJoCo. Using a provided oracle policy, the agents achieved expert-level mean evaluation returns after 5 and 30 iterations for the Ant-v2 and Humanoid-v2 environments, respectively. The implementation uses an MLP for the NN. Links: GitHub and writeup.
Below are the results of training the Humanoid-v2 and Ant-v2 agents using DAgger, visualized over iterations:
In my initial experimentation with diffusion, I set out to create an image diffusion model. The UNet-based architecture with 137 parameters took 3 hours of training on a dataset of 1,700 publicly available images of sheep. Considering the size of the dataset, even after augmentation, the results were promising!